杂文笔记
我用六年时间做了三架无人机!第一架是这样的:
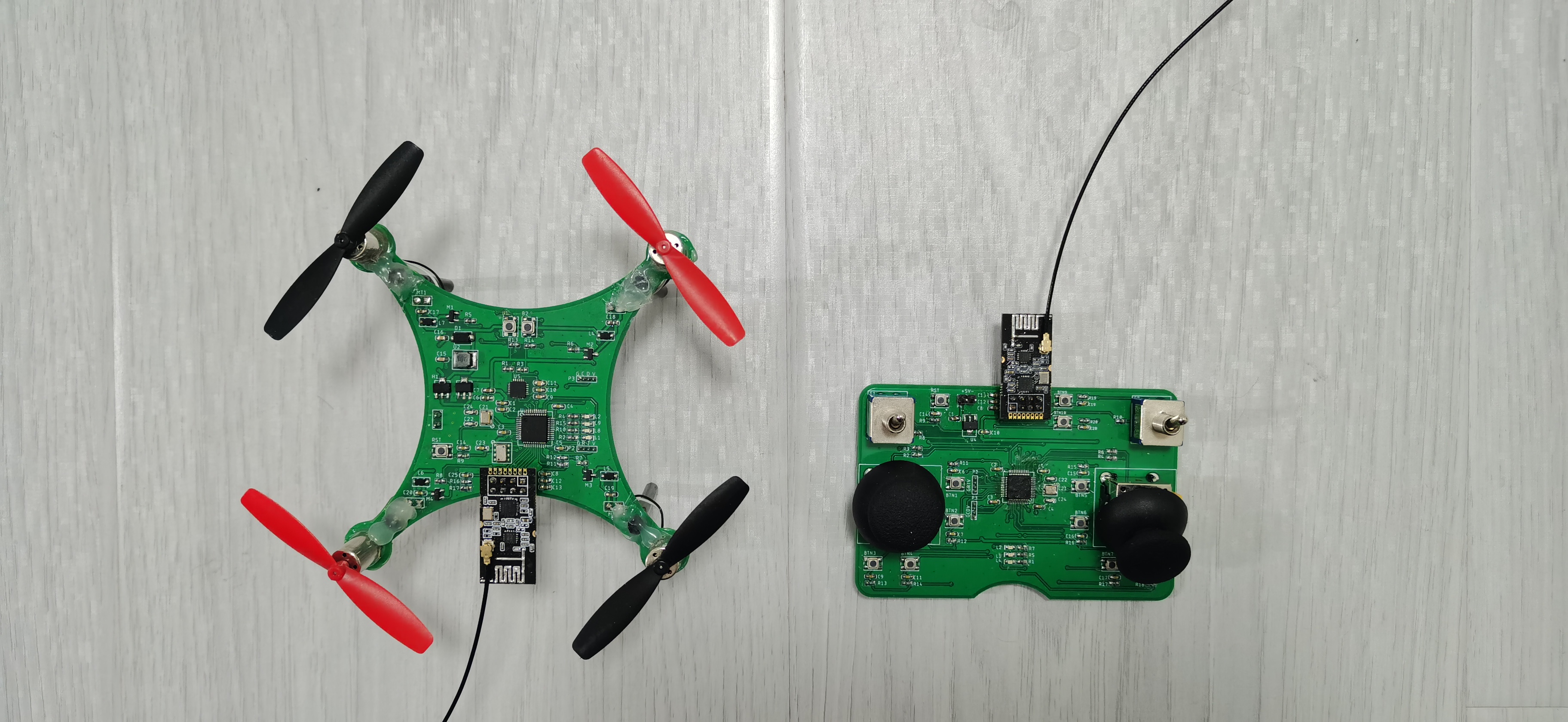

这是一架微型四旋翼无人机,我们通常叫它小四轴,虽然在这个年代小四轴已经多到满大街都是的地步了,但好在这是我自己设计的电路板,自己设计的无人机和遥控器,而且使用我自己开发的实时操作系统,系统上层使用自己开发的无人机控制系统。
第二架是这样的:
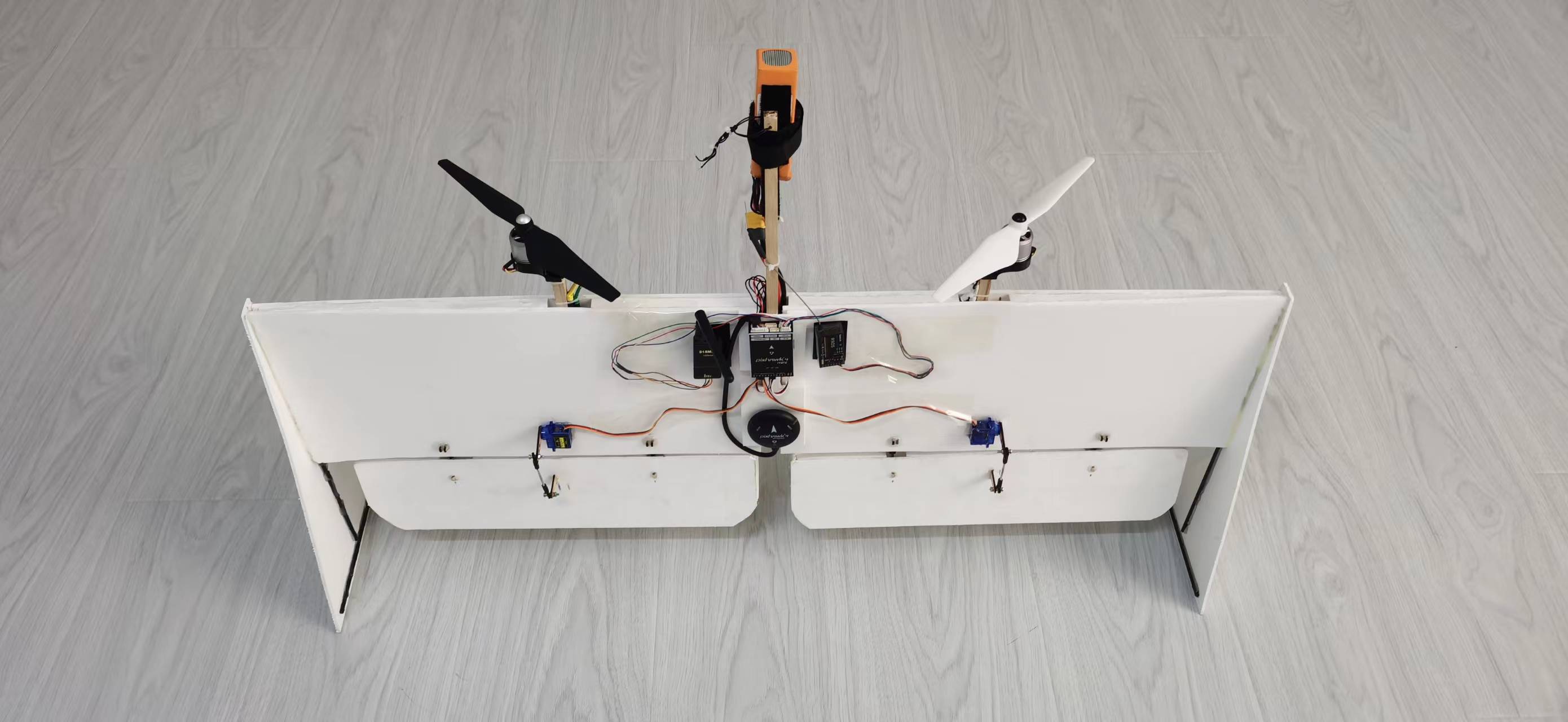

这是一架尾座式双桨双副翼无人机,它的特点是可以垂直起飞、垂直降落,起飞后可转为固定翼飞机飞行,执行完飞行任务之后再转换姿态垂直降落。它的优势是采用固定翼方式快速飞行,快速完成任务,并采用多旋翼方式起飞和降落,即可以快速完成任务,双节省了飞行跑道。
第三架是这样的:

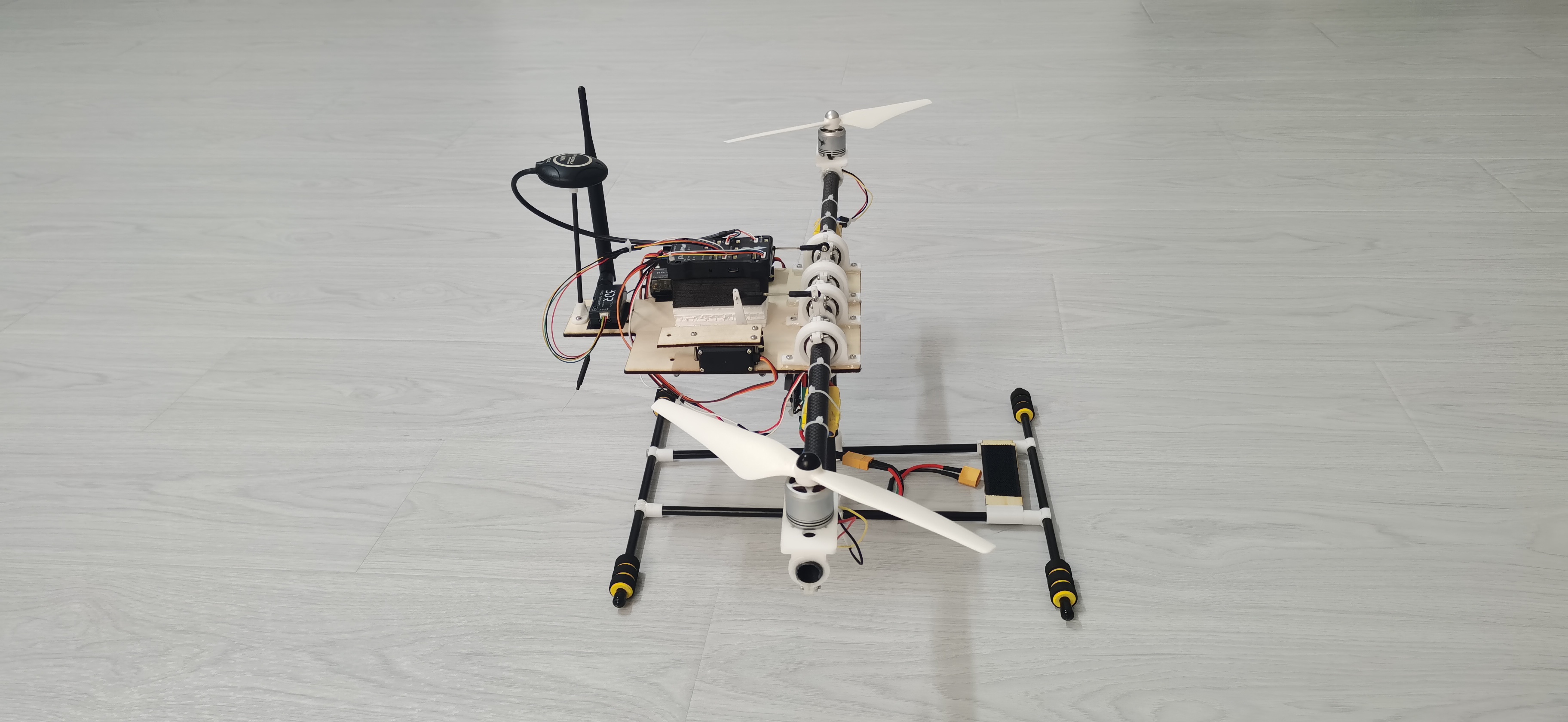
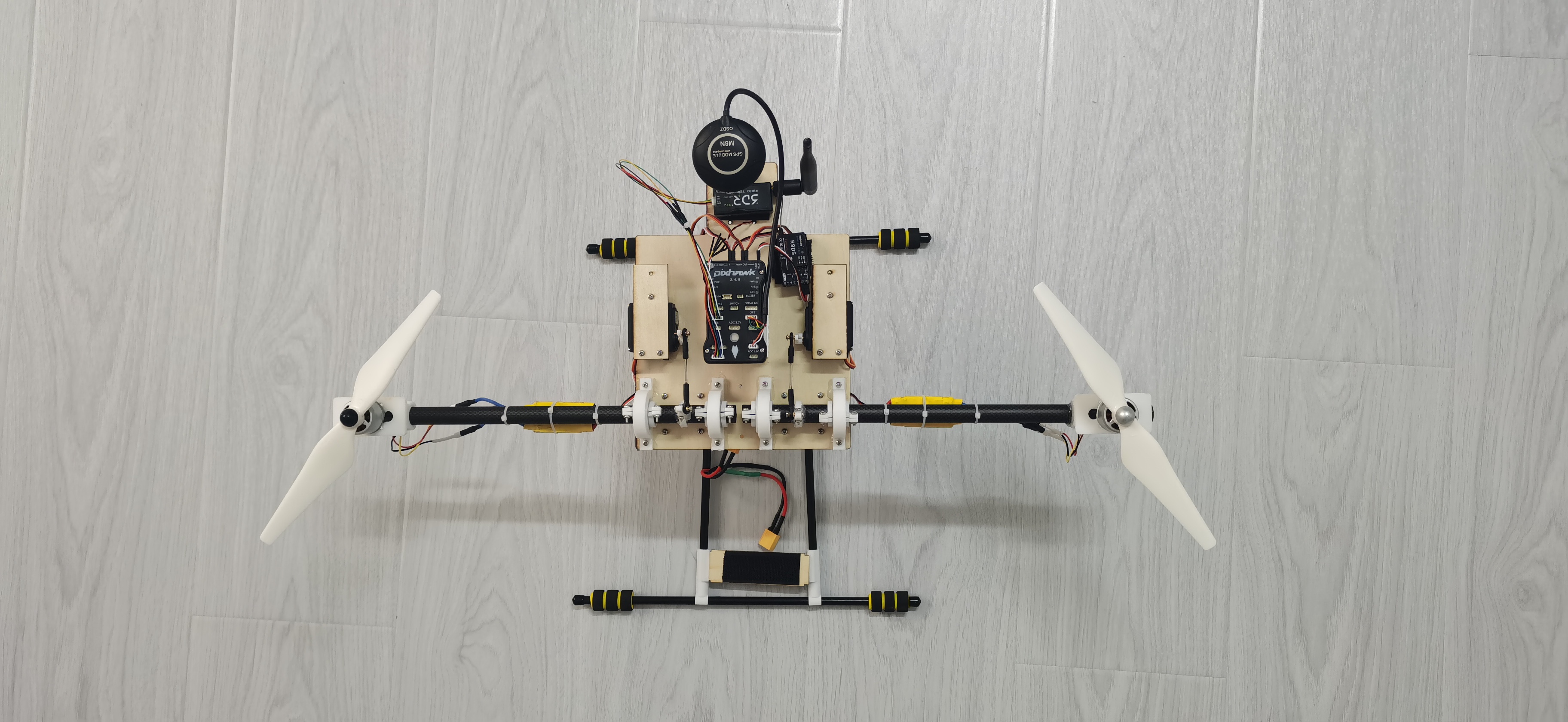
这同样是一架双桨旋翼机,它的飞行原理很像电影《阿凡达》里的双桨直升机:

当然了,它们看起来并不一样,其实我的这架无人机没有外壳,也并没有为两个螺旋桨外侧加入涵道。不过它们的飞行原理确是相同的。
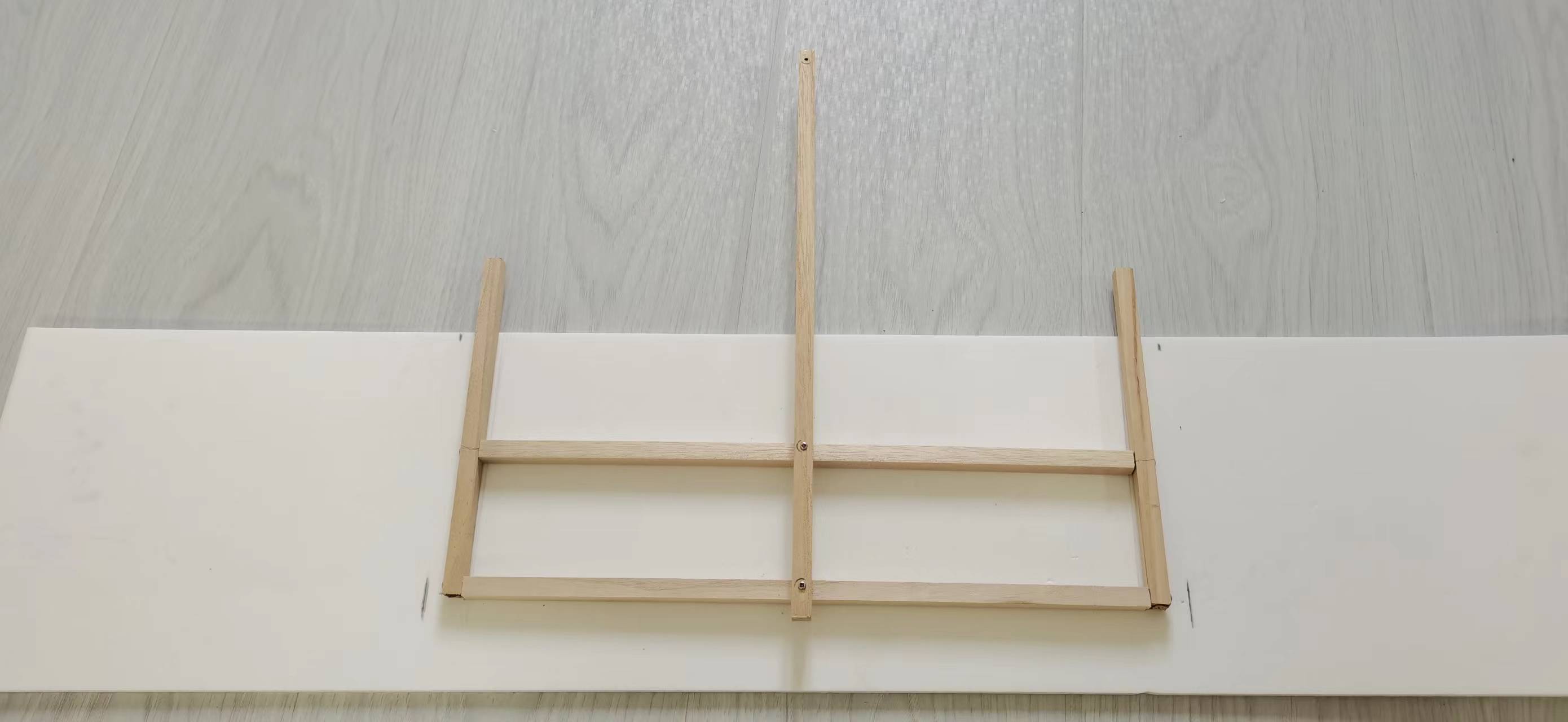
早在2016年,我产生了一个想要做无人机的梦想,于是我开始学习相关的知识和筹备材料,并做了一第一架无人机,它是这样的:

我用竹片作了一个飞机架子,采用树莓派作为主控电路板,外接一个MPU6050传感器,结果飞是飞起来了,不过也摔的很重。

后来,买了现成的机架,并不断的修改程序。终于可以让它能够勉强的飞起来了。
虽然我做的这款无人机离真正的商用无人机还差的很远,但经过无数次的失败和无数次的努力之后,收获也是很多的,比如学会了如何通过编程对机器做自动化控制,使用PID方法控制姿态、位置等等。
但这还远远满足不了我对无人机的追求,后来我购买了Pixhawk自驾仪,并使用开源的无人机控制程序PX4来完了了我自己的无人机飞行,我使用Pixhawk搭载PX4飞控程序对无人机进行控制,并使用一个树莓派与Pixhawk连接,由树莓派实时向无人机发送目标指令,让其按指定的航线进行飞行。

然而这还远远没有结束,我想自己设计一架微型的四旋翼无人机,于是我开始学习如何进行PCB电路的设计与做。经过几年的学习终于设计出了自己的小四轴无人机。
设计完电路板之后交付工厂打样,购买所需的芯片器件,进行焊接,调试,终于完成了我的小四轴无人机。飞行过程还算比较理想。
再后来,我用纯手工做了一架双桨垂直起降固定翼无人机,使用胶水把木条、泡沫板、碳纤维管和其它电子器件粘在一起,完成了整个无人机的机体结构。


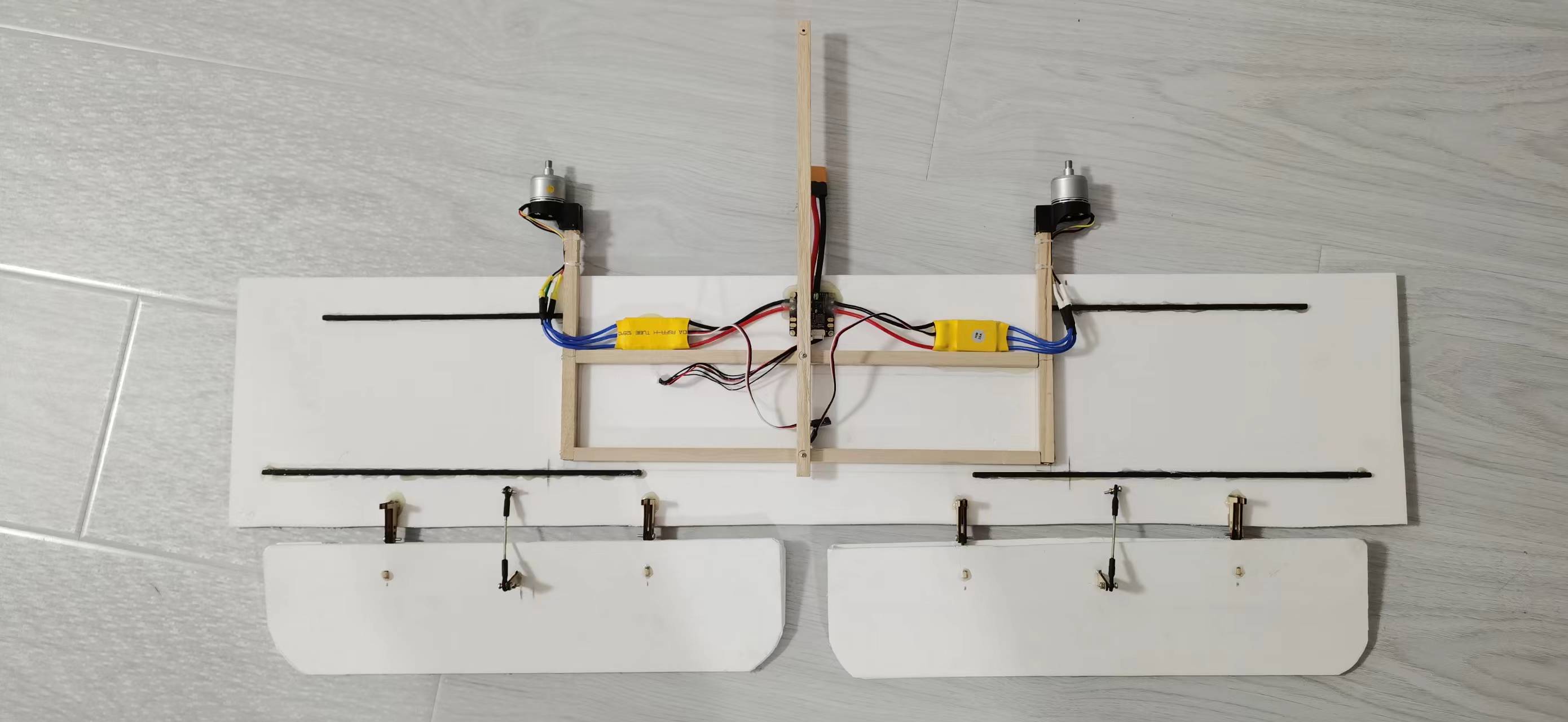

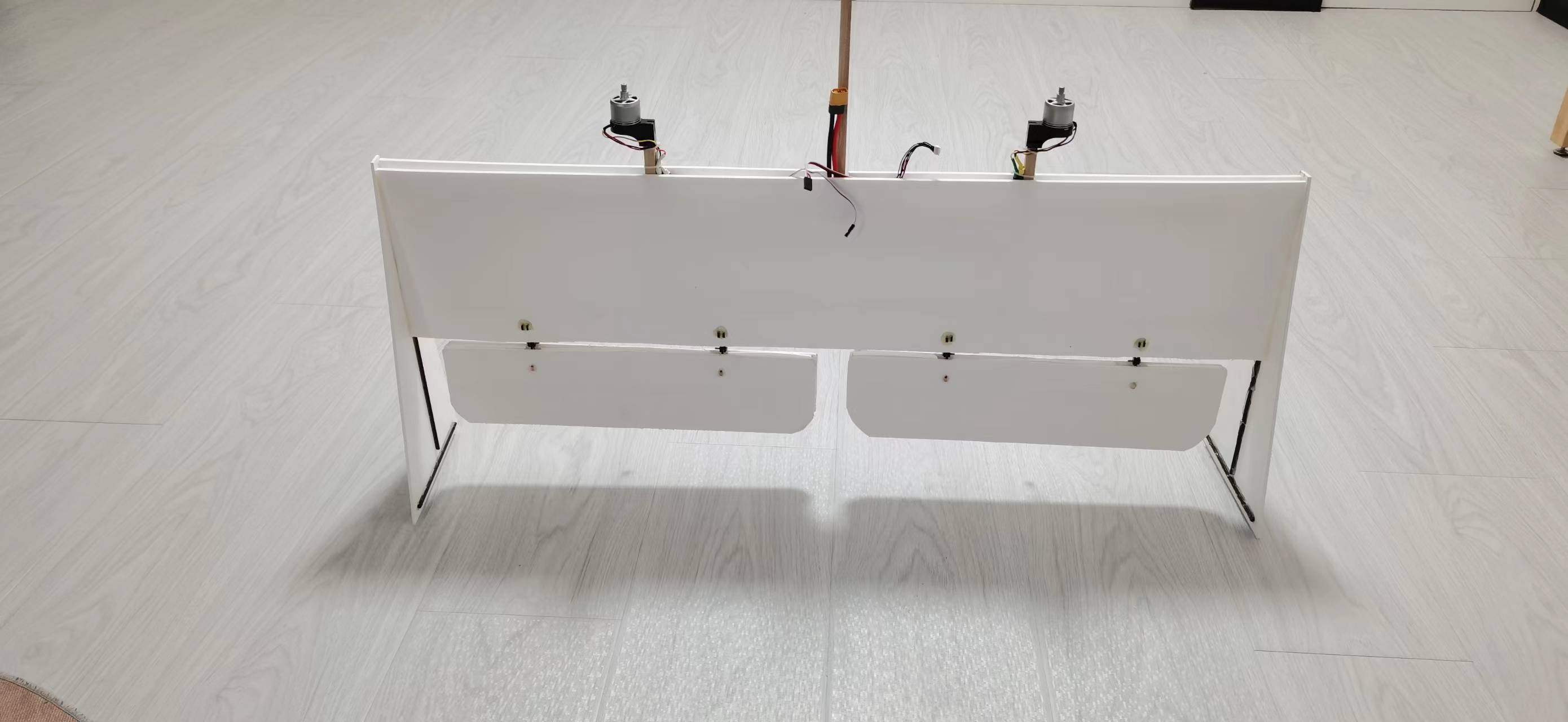
这架无人机可以垂直起飞和降落,并可以在空中变为固定翼飞行模式。
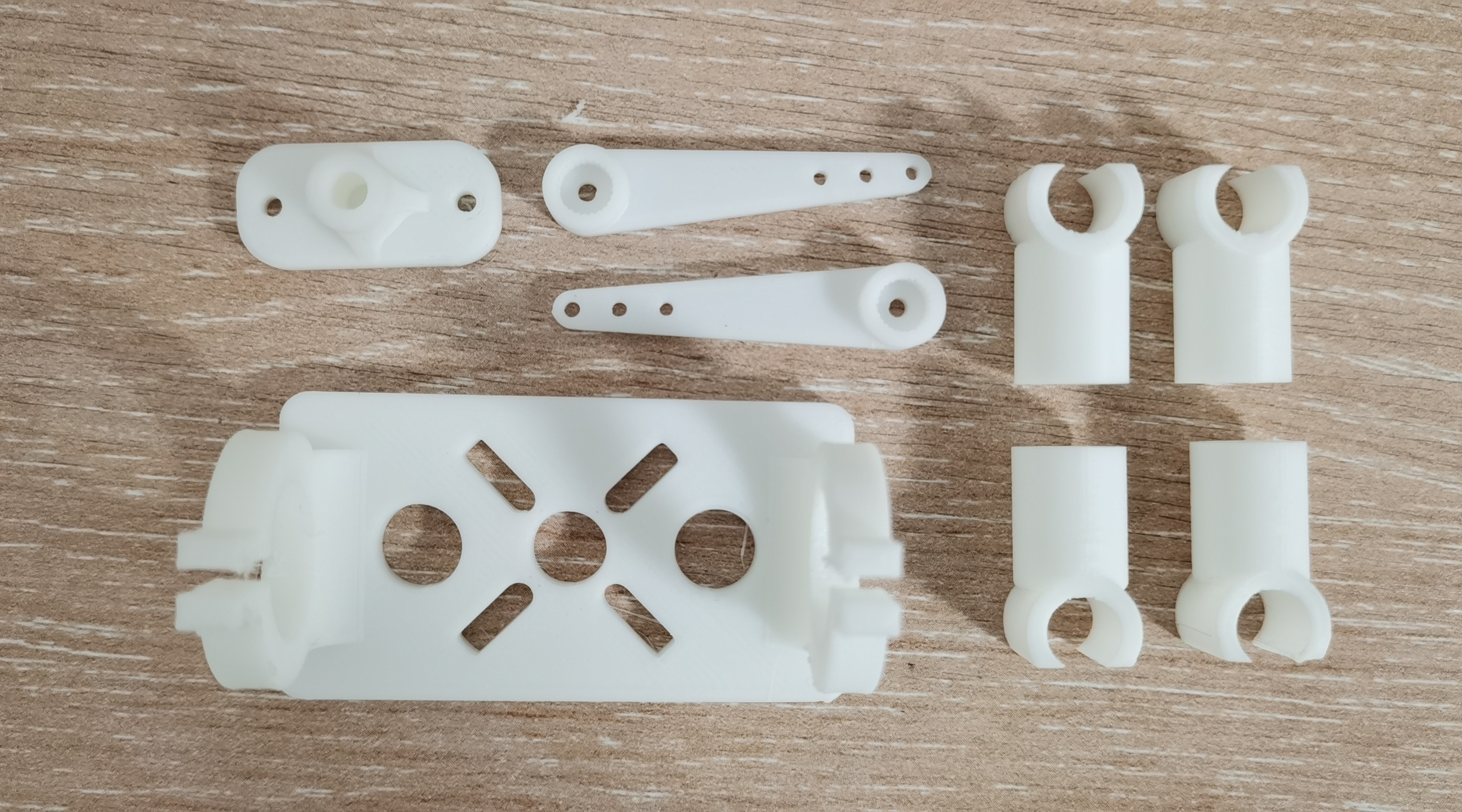
最后,为了做一架《阿凡达》战机,仅仅使用胶水和木条是不行的,我又苦心学习如何使用计算机软件进行3D建模,并购买了一台3D打印机,把需要的连接件和重要的部分都使用建模工具和3D打印机制作出来 。
最终将这些准备好的零件组装成整机:
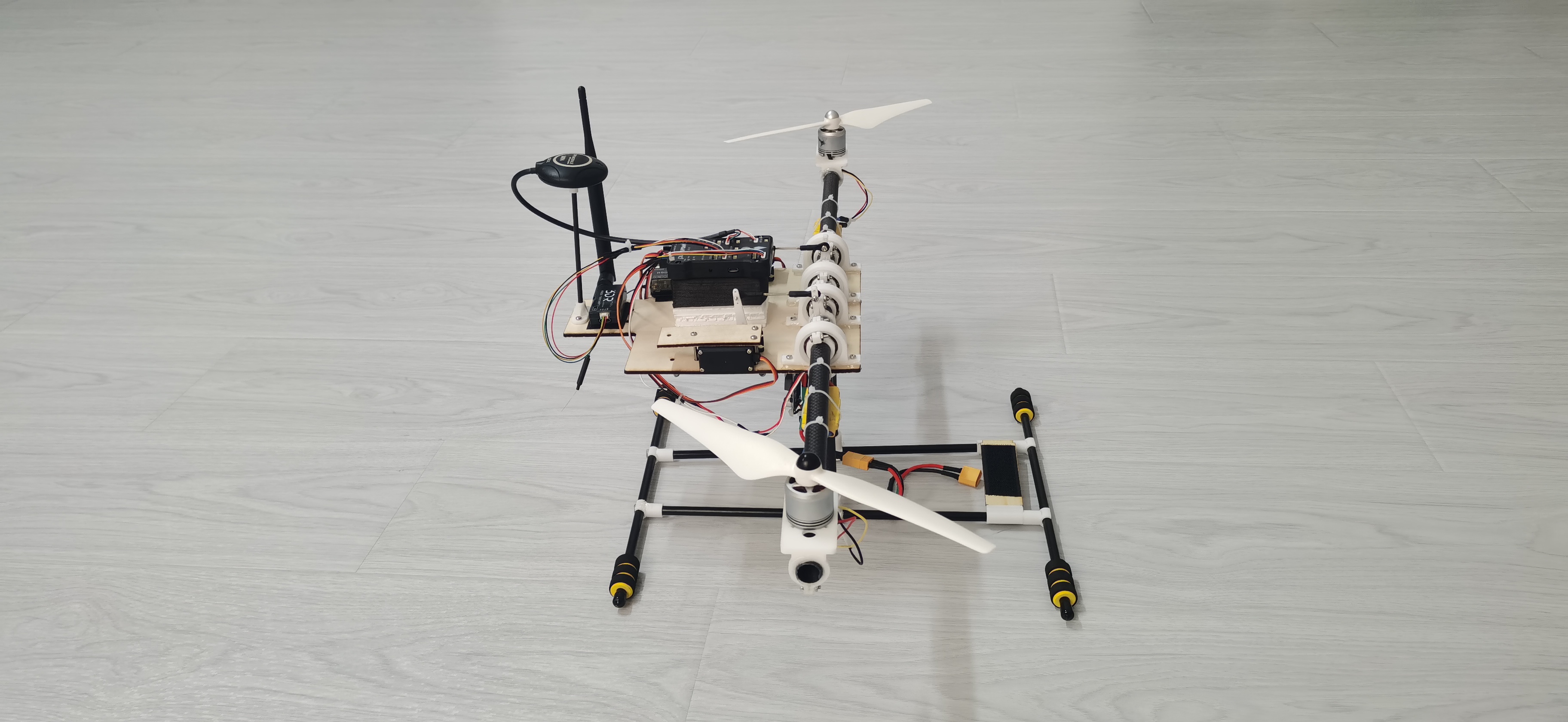
经过漫长的程序开发与飞行测试,不断的修改程序代码和调整控制参数,最终完成了这架无人机的稳定飞行。
从2016年我开始想要学习和制作无人机到今天已经过去了六年,学习的过程既有辛苦的汗水也有成功的喜悦,我也曾被螺旋桨划伤,我也曾经历无数次炸机,我也曾困惑,我也曾执著。然而经历了这许许多多的泪水与欢笑,回首来路不负时光,不负青春。希望我在年老的时候回顾人生时能够对自己说一句:“追逐梦想,青春无悔!”
Copyright © 2015-2023 问渠网 辽ICP备15013245号