多旋翼无人机
今天我们来一起谈谈硬件清单并组装一个多旋翼无人机。需要提前说明的是,关于硬件组装是学习无人机的基本内容,而不是全部内容。在把硬件组装起来只是完成了无人机的控制软件载体,而控制软件才是整个无人机的大脑。所以我们今天来完成硬件的组装,在下一讲中再来学习如何使用无人机控制程序。其实在前面的文章中我们已经大致了解了多旋翼无人机的飞行原理和基本硬件内容。我们再来复习一下硬件清单,这里我们只是针对初学者做一些型号推荐,而对于那些对无人机已经很熟悉的读者来说可以根据自己的需要自行选材,(自驾仪采用Pixhaw 2.4.8 以后不再赘述):

一、无刷电机

推荐使用2312 960KV无刷电机。无刷电机有几个常见指标:定子高度,定子宽度和电机KV值。我们通常在看电机参数时,可以看到电机型号会注明2212 2216 2312等等,前两个数字表示的是电机写字的直径,后两个数字表示的是电机定子的高度,单位均是毫米。例如:2206表示电机定子直径为22mm,定子厚度为6mm。2312表示电机定子直径为23mm,定子高度为12mm。2216表示电机定子直径为22mm,定子高度为16mm。
指标KV值表示电机在空载(不安装螺旋桨)的情况下,电压每增加1v,电机每分钟的转数增加多少。电机KV值越小,说明电机的动力越大,但速度越低;而KV值越大,说明电机的动力越小,但速度越快。你可以想像一下汽车的档位,档位越低(比如1档),发动机的动力越大,但速度越小;档位越高(比如5档),发动机的动力越小,但速度越快。
二、正反螺旋桨

螺旋桨采用9045正反桨,螺旋桨在螺旋线方向上两个相邻螺纹之间的距离。通常这个距离用英寸来表示,例如7045、8045、9045、1045这些指标的后两个数字表示其螺距为4.5英寸;7050、8050、9050、1050表示其螺距为5.0英寸。而前两个数字,表示其直径的大小,例如:8045表示桨的直径为8.0英寸,9045表示桨的直径为9.0英寸,1045表示桨的直径是10英寸,而不是1.0英寸。
三、无刷电调
可以使用LiPo 4S 20A无刷电调。电调的最高电压有Li-Po3(3节锂电池)、Li-Po4(4节锂电池)或Li-Po6(6节锂电池)等字样,表示电调所支持的最高电压是12.6v、16.8v或25.2v。电调的最高电压并不是越高越好,从直观感受上讲最高电压的越大,电调的体积就越大,重量也就越大,飞机的负载也就越大。所以在飞机设计中通常是选择合适的电调,而不是一味的选择高电压电调。最大电流通常是10A、15A、20A、30A或40A。如果在无人机飞行过程中我们需要电机高速转动,就需要更高的电压和更大的电流,如果电流值超过电调所能承受的最大电流时,就会导致电调过载,电调烧毁,电机停转,进而坠机的情况。所以电调最大电流的选择上也要慎重考虑,通常在450mm轴距以下的多旋翼中采用20A以下的电调就可以满足需要了。
四、动力电池

推荐选用4S 5300mAH 30C锂电池。动力电池的电压越高就可以驱动动力更强的电机转动。在小型有刷多旋翼无人机上使用的通常都是1s或2s锂电池。而中型多旋翼上使用的通常是3s、4s电池,6s电池通常用在更大的无人机上。
五、电源模块

pixhawk的额定电压为5v,我们不能用4S动力电池为其直接供电,那样高压电源会直接击穿飞控电路,所以必须采用合适的降压模块。另外,电源模块通过对动力电源的降压,引出一路0~2.5v的电源信号,可能在飞控中通过ADC来采集当前电源的电量。
六、安全开关(可选)

通常在无人机起飞前要通过长按安全开关来人工确认就绪状态,总共分为3个阶段:
1.在飞控程序启动过程中安全开关为快速闪动;
2.当飞控程序启动完成后安全开关为慢闪;
3.当手动长按安全开关后开关变为双闪(两次快速闪动)。
只有在按下安全开关之后,飞控程序才允许给电机解锁。安全开关的设计是防止在没有人工确认安全的情况下给电机解锁,但它并不是必要的。我们会在后续章节中给读者讲解如何禁用安全开关。
七、蜂鸣器(可选)

蜂鸣器是为了保证无人机在低电量时及时发出警报,通常在无人机飞控程序中会对警报的等级做设定,低电警报和超低电警报。一般来说是25%电量和10%电量。
八、遥控器+接收机


对于遥控器来说,操作方式可以选择日本手或美国手,我们在遥控器一节中已经说明,这两种模式只有操作习惯不同而没有功能不同,所以读者可以自由选择。而对于接收机来说,我们还是推荐使用SBus协议,Pixhawk已经集成SBus协议的反向器和协议解析程序。关于SBus的协议解析我们会在后续章节中学习。
九、全球定位系统GPS+HMC5883磁罗盘(可选,但推荐使用)

我们会在中级篇中给大家仔细讲解无人机的几个常用飞机模式,最基本的就是姿态模式、定高模式和定点模式。如果你只是一个航模爱好者的话,可以只使用姿态模式和定高模式,但我们的系列文章是以无人机为基础跟大家一起学习,所以后续我们要一起完成无人机的全自动飞行,因此我们希望无人机能有很好的定点飞行功能,所以还是推荐使用GPS模块。
关于磁罗盘方面我们需要简单做一些说明,对于外置磁罗盘比飞控板载磁罗盘有一定的好处,就是在安装时,飞控板通常安装在无人机的几何中心,通常与电机在一个水平位置上,在电机高速转动时会对磁罗盘产生磁干扰,所以在大多数情况下,GPS模块(里面集成了外置磁盘罗)需要通过一个支架远离电机的水平面,这样来避免电机磁场对外置磁罗盘的干扰:

十、数传或4G模块(可选,但推荐使用)

对于普通航模来说,飞机模型在操控者的视野内飞行,并由操控者实时控制,也可不使用数传与地面通讯。但对于无人机来说,我们还是希望飞机能通过数传或通过4G模块实时将飞机状态回传到地面站。这也是我们在地面可以直接操控飞机的一个基础。数传我们需要一对两个:一个接飞控,另一个接PC地面站。对于4G模块我们不会做过多的介绍,从使用者的角度上讲4G与数传没有本质上的不同,无非是通讯方式和链路不同而已(内部电路实现有很大不同),如果读者选择了4G模块就需要自己搭建一个服务器和与本地PC地面站通讯的链路,但从原理上讲与数传的功能一样。
十一、机架

对于刚刚接触无人机的读者,我们还是推荐使用性价比较高的F450机架。当然有兴趣的朋友也可以自己设计机架或是购买碳纤维机架。
十二、云台+相机(可选,航拍爱好者推荐)

对于航拍云台和相机,有兴趣的朋友可以自已选择,通常云台会装有一套水平仪,当飞机出现姿态变化时,云台会自动调整转轴的角度从而使相机仍然处于水平。云台上通常也会装有pitch、roll、yaw三个维度的控制接口,可以使用接收机或飞控接口来对其做控制。使云台相机处于我们想要的状态。航拍相机通常分为两种,一种是有独立的数据传输模块(图传)和拍照控制功能,也就是说从控制上讲相机可以与无人机完全分离;另一种是相机需要接入飞控板,并通过飞控程序来控制相机的拍摄与实时图传。
组装:
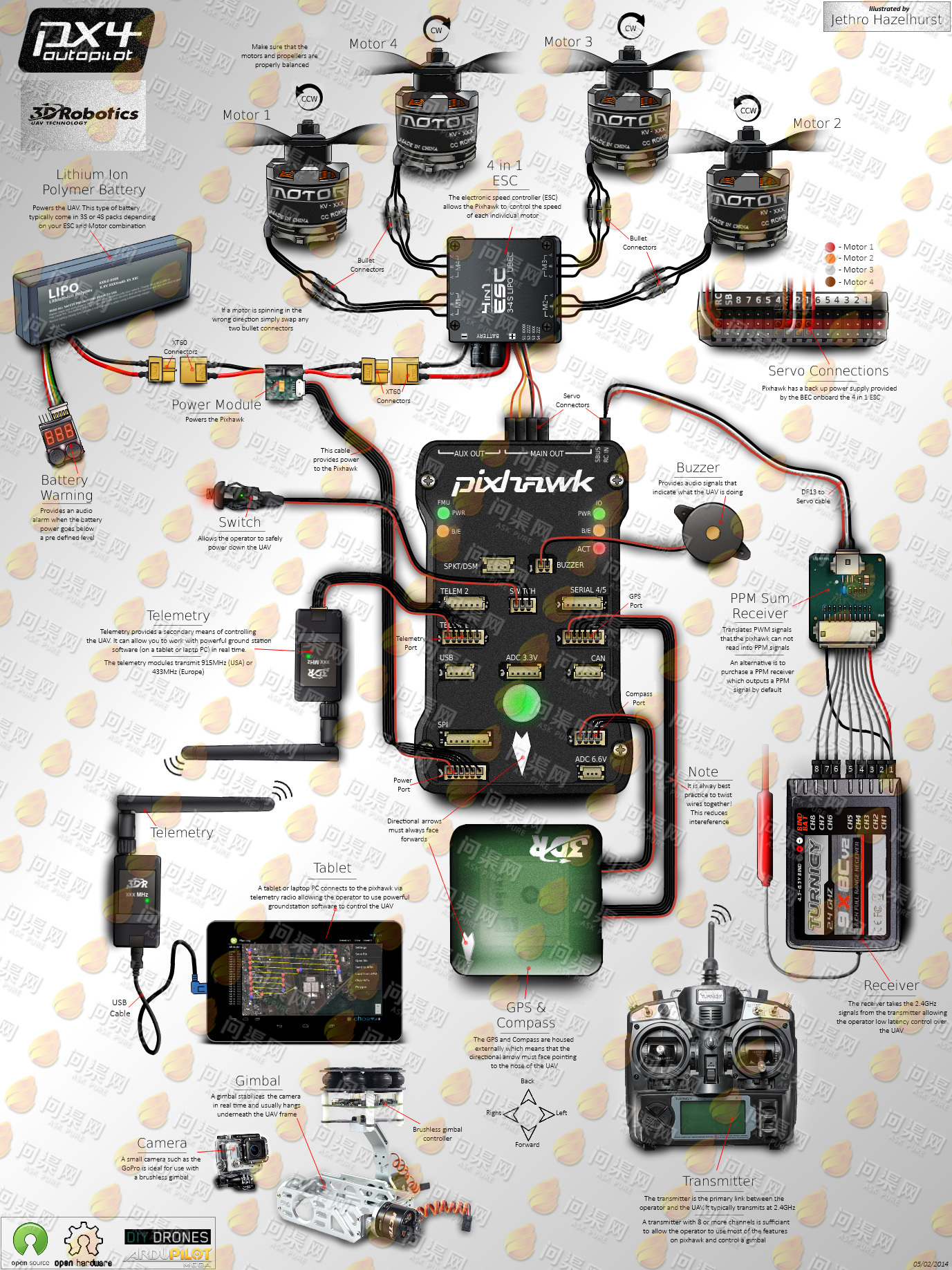
关于组装的过程,其实我们在这里并不会讲解的十分仔细。因为上述的所有部件几乎都是可以与Pixhawk直接对接的。读者们只要有耐心和简单的手动能力就可以将无人机安装好,下面附上一张Pixhaw连接图作为参考:
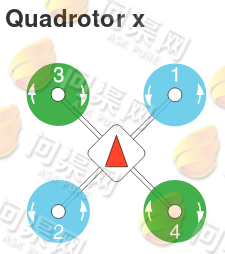
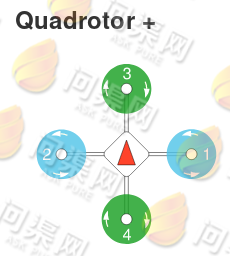
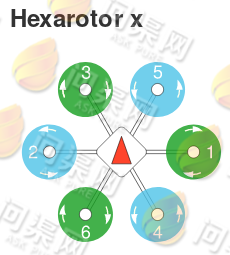
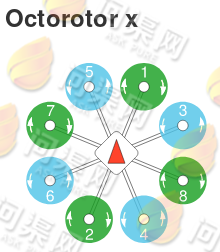
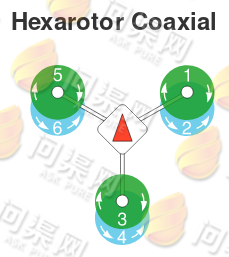
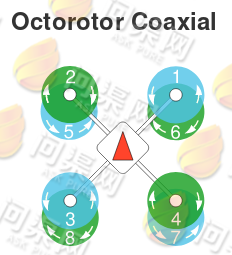
另外,很多初学者对多旋翼的PWM通道还不太熟悉,不知道电调信号与Pixhawk的PWM输出通道如何连接,下面我们给出常见的多旋翼安装示意图,下图中1、2、3、4、5、6、7、8分别表示Pixhawk中PWM输出主通道的M1、M3、M3、M4、M5、M6、M7、M8:


Copyright © 2015-2023 问渠网 辽ICP备15013245号