多旋翼无人机
无人机在飞行过程中依靠特定的传感器来进行系统状态的测量,为了得到无人机的姿态信息(俯仰、滚转和航向角)需要根据陀螺仪所测量到的角速度进行积分得到角度信息。为了得到无人机的速度信息和位置信息,需要根据加速度计所测量到的角速度进行积分得到速度,对速度再次积分得到位置信息。但是就很多采用MEMS传感器的无人机来说,传感器的往往噪声很大,加上无人机在飞行中的不确定性,将直接的测量到的结果直接进行计算所得到的误差往往很大,与无人机实际的状态偏差很大。
为了能够很好的对无人机的实时状态进行测量和估计,通常采用的是卡尔曼滤波器。卡尔曼滤波器要求系统的噪声误差满足高斯分布,在这个条件下,卡尔曼滤波器可以在此线性状态空间上将上一时刻的最优估计和当前时刻的加速度计、陀螺仪等传感器所测量到的数据进行融合得到当前时刻的预测值,再将当前时刻的预测值与磁罗盘、GPS等传感器所测量得到的数据进行融合得到当前时刻的最优估计。
假设在理想状态下,无人机以匀速直线运动向前飞行,在t_0时刻其位置为p_0,在t_1时刻其位置为p_1。其速度、位置与时间的关系如下图所示:
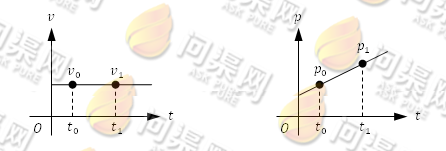
由于是匀速直线运动,因此在t_0和t_1时刻之间无人机的速度都是相同的,也就是说v_0等于v_1。此外,我们知道在t_0时刻无人机的位置为p_0,由此可以计算出在t_1时刻其位置p_1:
但是在实际情况下,无人机由t_0时刻到达t_1时刻这一段时间内,并不是匀速直线运动。无人机在飞行过程中可能受到气流影响,其本身结构与安装误差,螺旋桨边缘破损,多个电动机存在细微差异等等这样一系列问题会直接影响其正常飞行。因此不能将其运动规律看成是匀速直线运动,也无法根据匀速直线运动公式计算出其准确的位置。但是我们可以使用加速度计的读数作为无人机在短时间内速度的变化量。将此速度的变化量作为输入值与上一时刻的速度进行计算,得到当前时刻的预测值,之后将此预测值与GPS所得到的速度的测量值进行融合,最后得到无人机在当前时刻速度的最优估计值。这就是卡尔曼滤波器的工作原理。
在对无人机状态估计的过程中,我们称加速度计和陀螺仪这样的传感器所得到的数值为输入值。而对磁罗盘、GPS和气压计所得到的数值为测量值。
将卡尔曼滤波器的工作原理写成公式
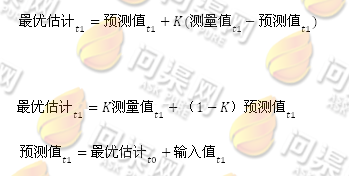
其中,K为卡尔曼增益;输入值为加速度计或陀螺仪的测量读数。例如:由加速度计测量得到加速度并积分得到速度。
Copyright © 2015-2023 问渠网 辽ICP备15013245号