从晶元到人工智能
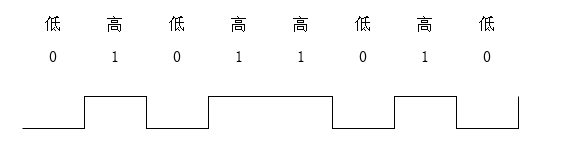
在这一节里我们来一起完成STM32F407VE中的串行总线功能。所谓串行总线就是我们常常说的串口。串口中的信号线(数据线)只有2条,一条线为Tx,另一条为Rx,也就是发送线和接收线。所以称它为串行,就是通过一根信号线的产生一个序列的高低电平来完成数字信号中一个字节的数据。例如:我们知道计算机中都是采用二进制来表示数的,如果我们需要在串行总线上传输一个字节的数据,如0x5A,那么这个字节的二进制为:01011010,所以我们就需要让串行总线产生的高低电平序列为:低、高、低、高、高、低、高、低,每一个高低电平,我们在计算机中称之为Bit(比特):
这样,我们就知道串行总线所产生的高低电平时序了。其实除了正常数据传输所用到的Bit位之外,串行总线还有数据传输的控制标记位,通常有起始位、停止位和校验位,但在我们实际使用串行总线时常常只使用一个起始位和一个停止位而不使用校验位。于是,我们使用STM32的标准库来完成串行总线的配置工作。首先来配置串口的NVIC中断:
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_4);
NVIC_InitStructure.NVIC_IRQChannel = USART2_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0x2;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0x0;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
我们使用的是USART2,也就是串口2。我们将其主优先级设置为2,子优先级设置为0。接下来配置串口2的两个信号线引脚PA2和PA3:
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA, ENABLE);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART2, ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2 | GPIO_Pin_3;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_NOPULL;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_PinAFConfig(GPIOA, GPIO_PinSource2, GPIO_AF_USART2);
GPIO_PinAFConfig(GPIOA, GPIO_PinSource3, GPIO_AF_USART2);
最后,配置串口的相关参数和中断方式:
USART_InitTypeDef USART_InitStructure;
USART_InitStructure.USART_BaudRate = 115200;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
USART_InitStructure.USART_StopBits = USART_StopBits_1;
USART_InitStructure.USART_Parity = USART_Parity_No;
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;
USART2->CR1 |= (USART_CR1_RE | USART_CR1_TE);
USART_Init(USART2, &USART_InitStructure);
USART_ITConfig(USART2, USART_IT_RXNE, ENABLE);
USART_Cmd(USART2, ENABLE);
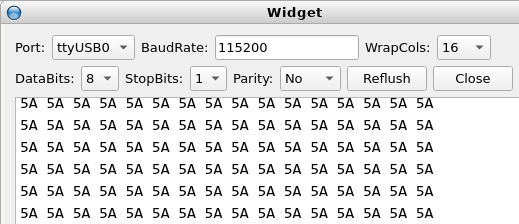
在这里,我们将串口2的波特率设置为115200,并设置数据位为8Bit,一个停止位,无校验位。并设置了接收和发送中断。
这样,我们就完成了串口2的配置工作,接下来我们需要完成两个函数,分别用于串口数据的发送和接收:
void uart_write(uint8_t data)
{
int next_head = tx_head + 1;
if (next_head >= tx_buff_size)
{
next_head = 0;
}
while (next_head == tx_foot)
{
}
tx_buff[tx_head] = data;
tx_head = next_head;
USART2->CR1 |= USART_FLAG_TXE;
}
int uart_read(uint8_t* ch)
{
int foot = rx_foot;
if (rx_head == foot)
{
return 0;
}
else
{
uint8_t data = rx_buff[foot];
foot++;
if (foot >= rx_buff_size)
{
foot = 0;
}
rx_foot = foot;
*ch = data;
return 1;
}
}
void uart_data_in(uint8_t data)
{
int next_head = rx_head + 1;
if (next_head >= rx_buff_size)
{
next_head = 0;
}
if (next_head != rx_foot)
{
rx_buff[rx_head] = data;
rx_head = next_head;
}
else
{
next_head++;
next_head--;
}
}
void USART2_IRQHandler(void)
{
//UART1
int foot = 0;
uint8_t data = 0;
if (USART2->SR & USART_FLAG_RXNE)
{
data = USART2->DR & 0x1FF;
uart_data_in(data);
}
if (USART2->SR & USART_FLAG_TXE)
{
foot = tx_foot;
if (foot != tx_head)
{
USART2->DR = tx_buff[foot];
foot++;
if (foot >= tx_buff_size)
{
foot = 0;
}
tx_foot = foot;
}
else
{
USART2->CR1 &= ~USART_FLAG_TXE;
USART2->SR = ~USART_FLAG_TXE;
}
}
}
实际上,串口的发送和接收都是采用了void USART2_IRQHandler()串口2的中断函数来完成的,当我们需要发送一个字节的数据时,调用void uart_write(uint8_t data)函数将data这个字节的数据存放到发送队列(发送缓冲区)当中,并同时打开发送中断。在发送中断函数中从发送队列当中取出需要发送的字节发送到串行总线上。
相反的,当接收总线上收到一个字节的数据时,就会产生一个接收中断,void USART2_IRQHandler()接收中断函数调用void uart_data_in(uint8_t data)函数将这个字节的数据存放到接收队列(接收缓冲区)当中,而我们通过调用int uart_read(uint8_t* ch)函数来从接收队列中读取接收到的数据。
于是,我们可以在main()函数中对串口2进行初始化配置,并使用它来与上位机软件进行通信:
int main(int argc, char* argv[])
{
init_led();
uart_init();
char buff[100] = {0};
while (1)
{
uart_write(0x5A);
GPIO_WriteBit(GPIOE, GPIO_Pin_0, 1);
GPIO_WriteBit(GPIOE, GPIO_Pin_1, 0);
for (int i = 0; i < 500000; i++)
{
}
GPIO_WriteBit(GPIOE, GPIO_Pin_0, 0);
GPIO_WriteBit(GPIOE, GPIO_Pin_1, 1);
for (int i = 0; i < 500000; i++)
{
}
}
}
我们使用上机的串口读写程序来得到STM32通过串口发送的数据:
我们可以使用逻辑分析仪来查看串行总线上每一个字节的传输方式:

我们可以看到串行总线上的Bit位序列为0 01011010 1,其中第一个0为起始位,最后一个1为停止位,而中间的01011010为8个Bit的数据位,转成16进制则是0x5A。这样我们就完成了STM32F407VE的串行总线配置和数据发送,而数据接收与发送的原理是一样的,我们不再赘述。
Copyright © 2015-2023 问渠网 辽ICP备15013245号