自制小四轴
我们的小四轴主板电路设计完毕之后,接下来的工作就是要设计一个遥控器的电路。我们希望可以使用自己遥控器来控制小四轴的飞行。我们采用的单片机仍然是STM32F103C8T6这款。
首先,我们需要两个双轴摇杆用来控制无人机的4个标准动作:俯仰、滚转、航向、油门。我们采用的双轴摇杆如下图:
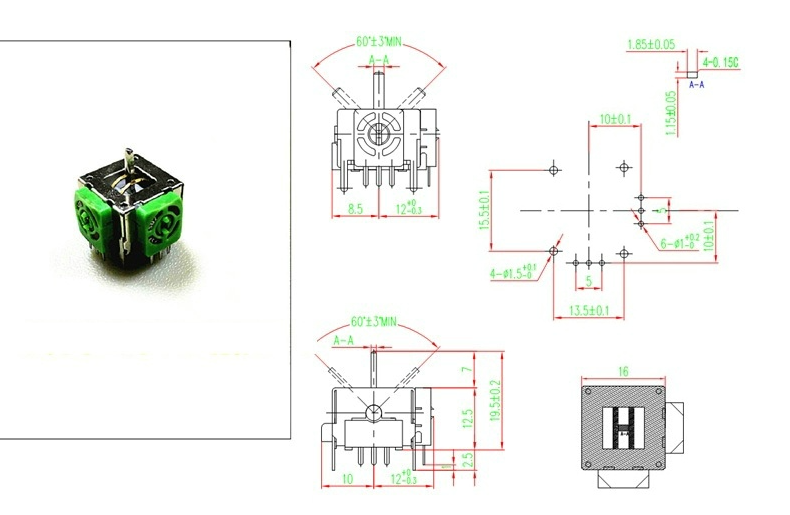
这款遥杆是游戏手柄上的配件,并不是无人机专用摇杆,但在我们的这个小四轴项目中可以使用。其实这一个摇杆中有2个10K的滑动变组器,当我们沿着水平方向改变摇杆的位置时,水平方向上的电阻会由0K变化为10K,而其居中时其电阻值为5K,于是我们可以设计一个电路来采集其两端电压,从而获得摇杆的位置。具体电路设计如下:
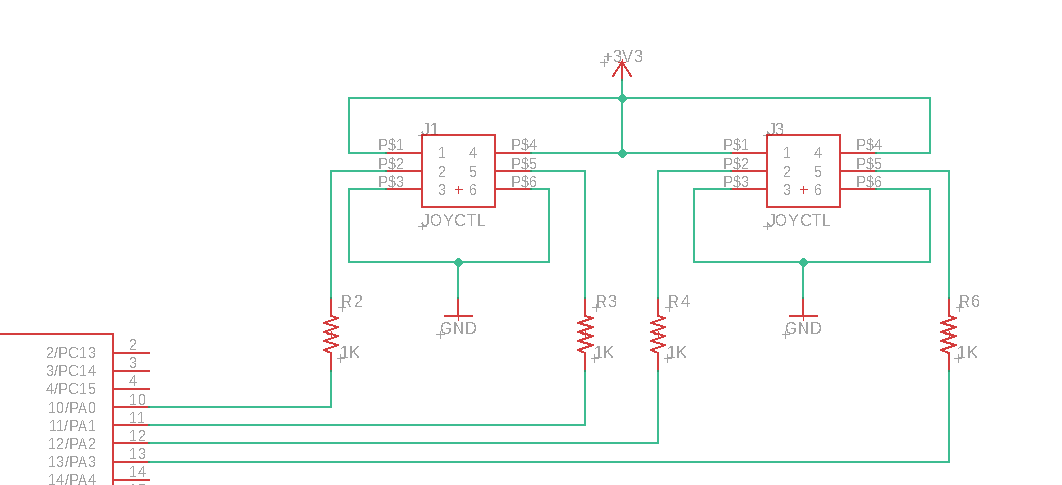
我们通过单片机的PA0、PA1、PA2、PA3这4个脚的AD采集功能来对两个摇杆的4个滑动变阻器(后续称之为遥控器通道)进行电压采集,从而获取摇杆的位置,程序部分我们会在后续内容中介绍。
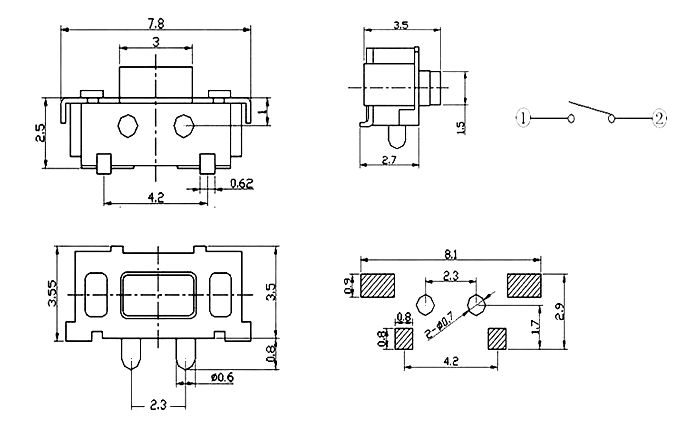
其次,我们还需要8个辅助按钮,用于对这4个遥控器通道的信号做微调,每一个通道需要增加、减小这两个功能按键,我们采用了8个微型按钮,如下图所示:

按钮的电路如下:
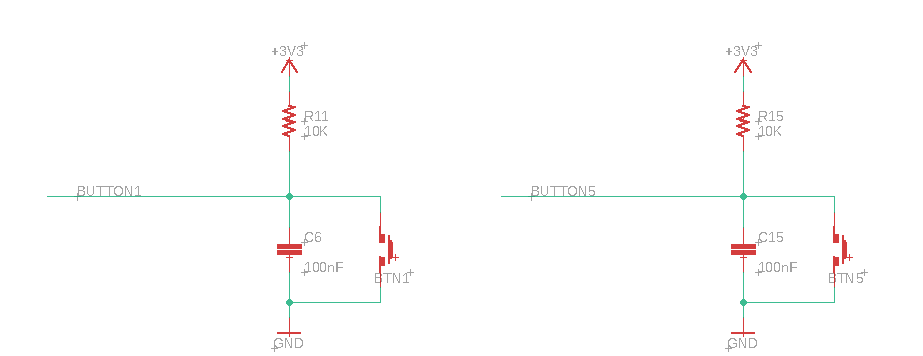
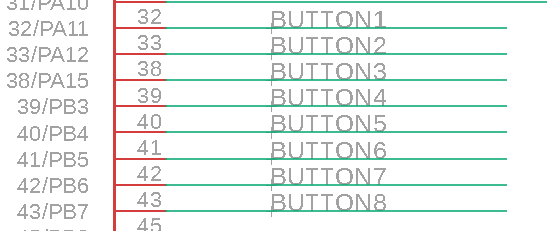
这里我们只给出了按键1和按键5的电路,其它按键的电路都是一样的,无需重复,它们分别接入单片机的PA11、PA12、PA15、PB3、PB4、PB5、PB6、PB7脚。我们同样的只使用这些脚的普通GPIO高低电平状态判断即可。也就是说我们只需要知道这些按钮是否被按下就可以了。
第三,我们还需要两个可以进行拨动的开关,用于控制无人机的一个状态开关,如校准和解锁功能等,我们采用的拨动开关如下:

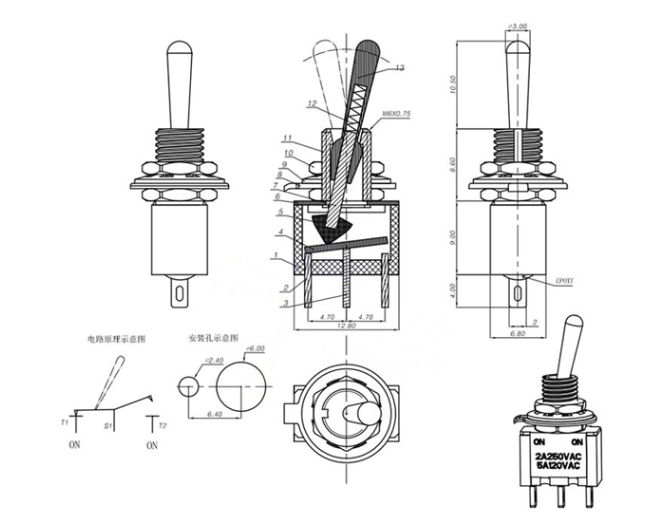
此开关与遥控器的摇杆类似,但它只有两个档位,也就是开与关,所以我们并不需要使用AC采集,而只需要使用普通的GPIO的高低状态判断即可。其电路如下:

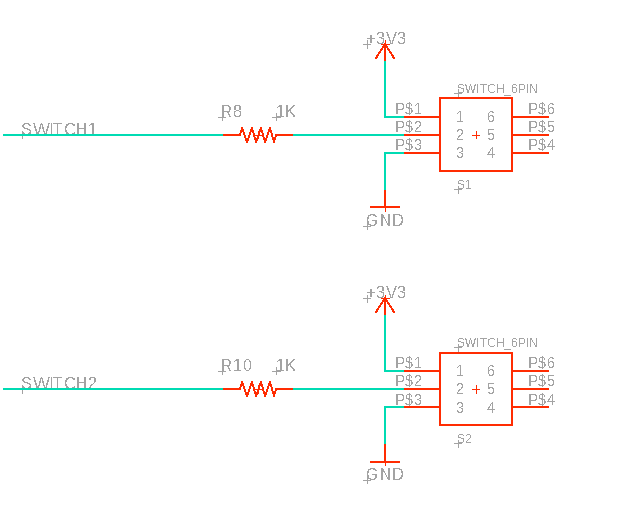
其中,SWITCH1和SWITCH2连接的是单片机的PB15和PA8脚,我们只需要使用其GPIO普通功能即可。
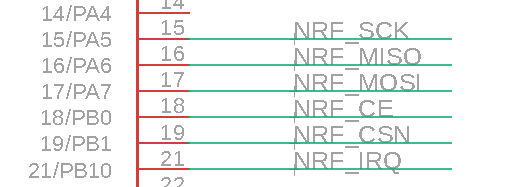
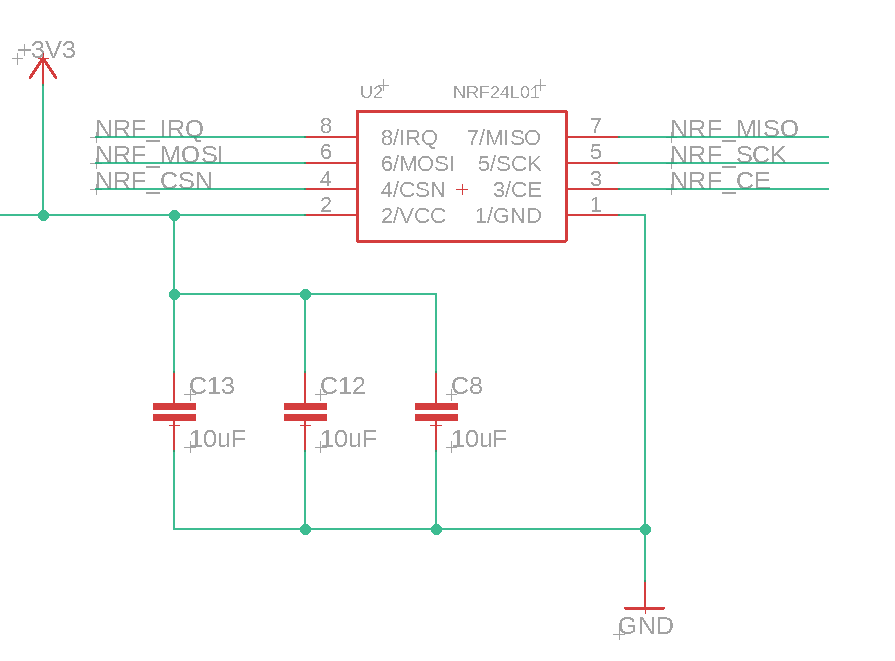
第四,我们的遥控器与四轴通信部分的电路是完成一样的,我们使用NRF24L01来完成其通信功能,电路如下:
第五,我们还需要两个额外按键,来做为遥控器的另外2个通道,作为预留功能。其电路图与上述8个辅助按钮相同,这里不再赘述,使用单片机的B12、B13脚,如下图所示:
此外,我们还需要一些其它的辅助性功能,如电源电路、LED指示灯,串口输入输出、JLink烧录口等,具体内容。这与我们上一讲中的小四轴电路完全一致。
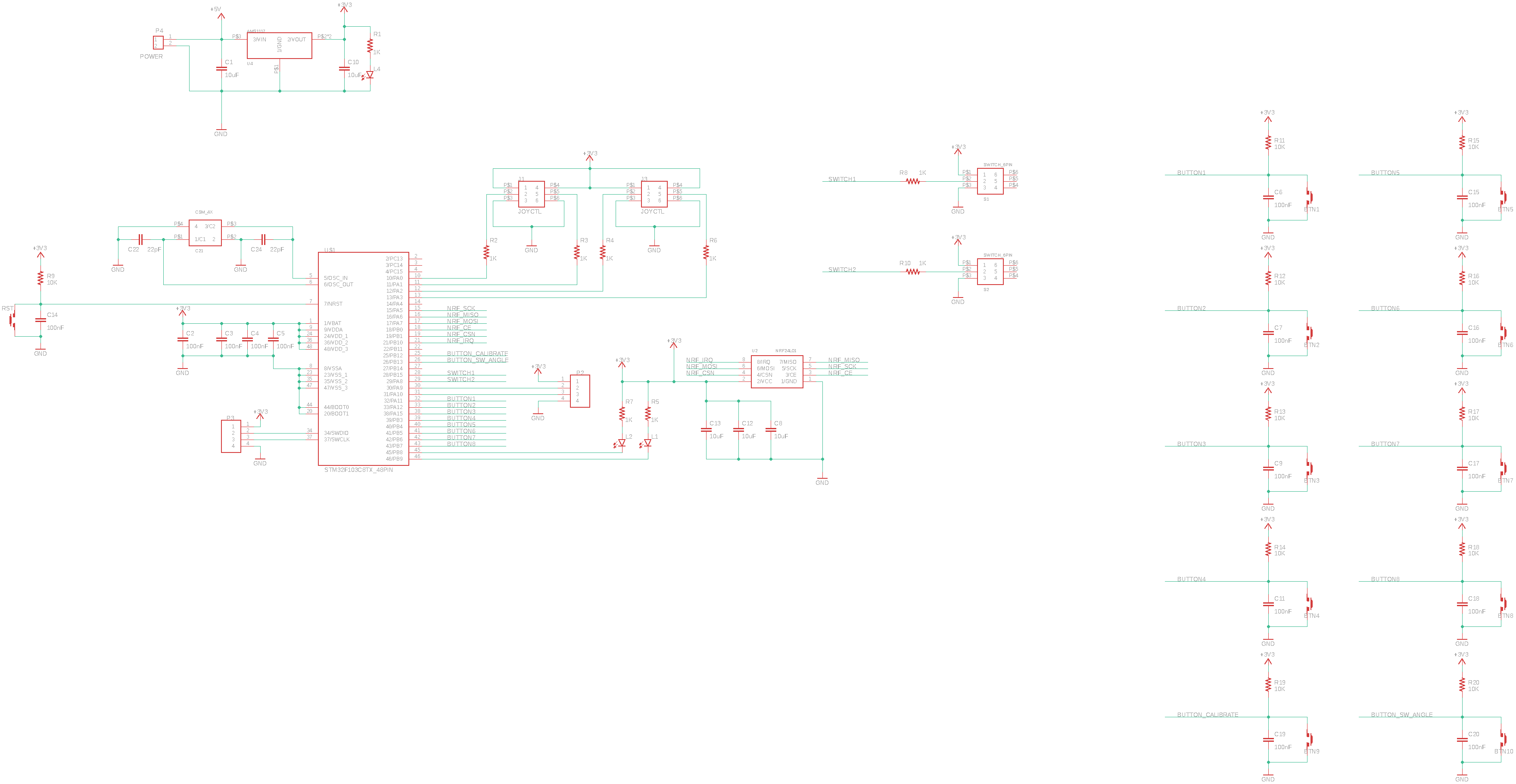
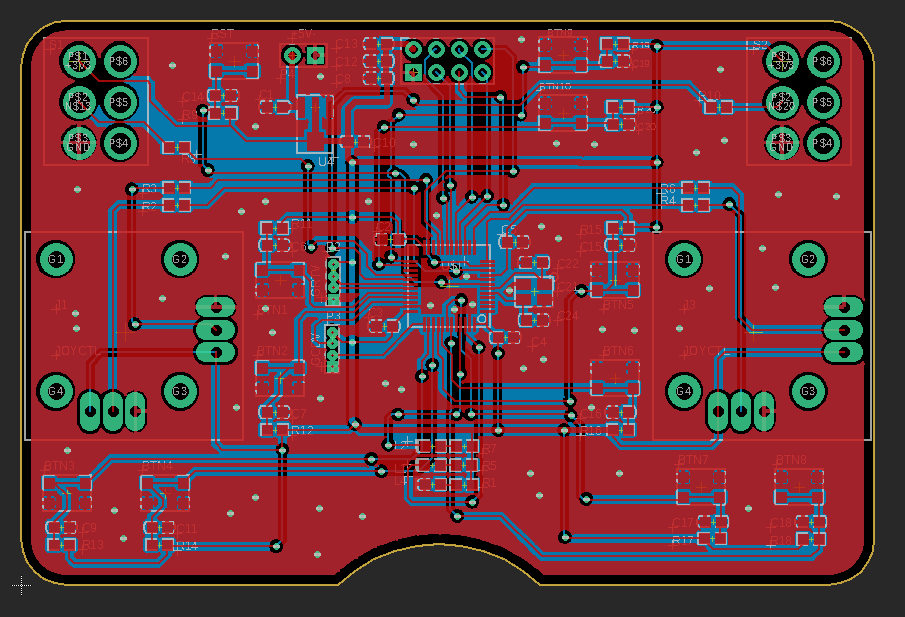
最后我们给出遥控器的完整电路设计与最终PCB布线结果:
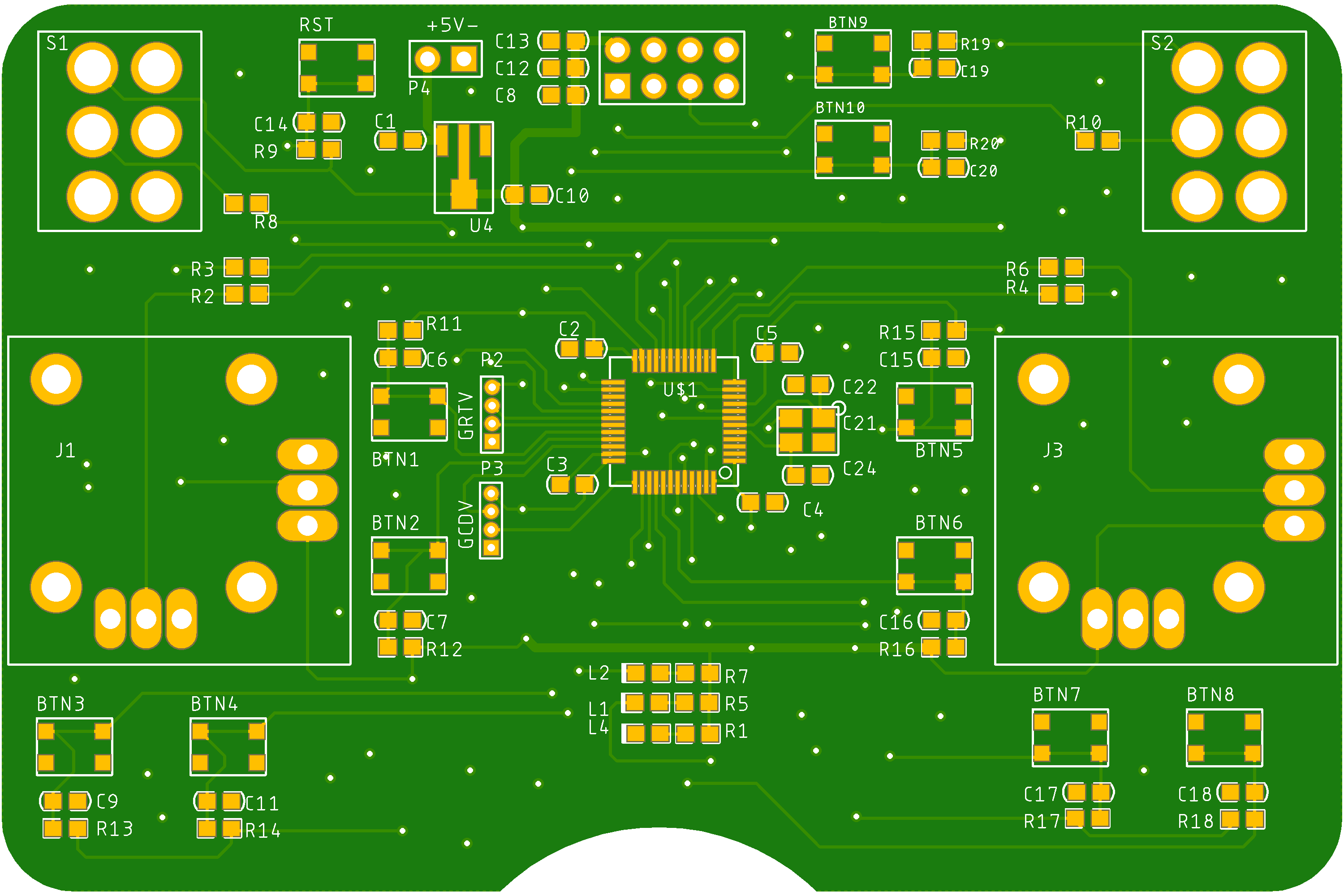
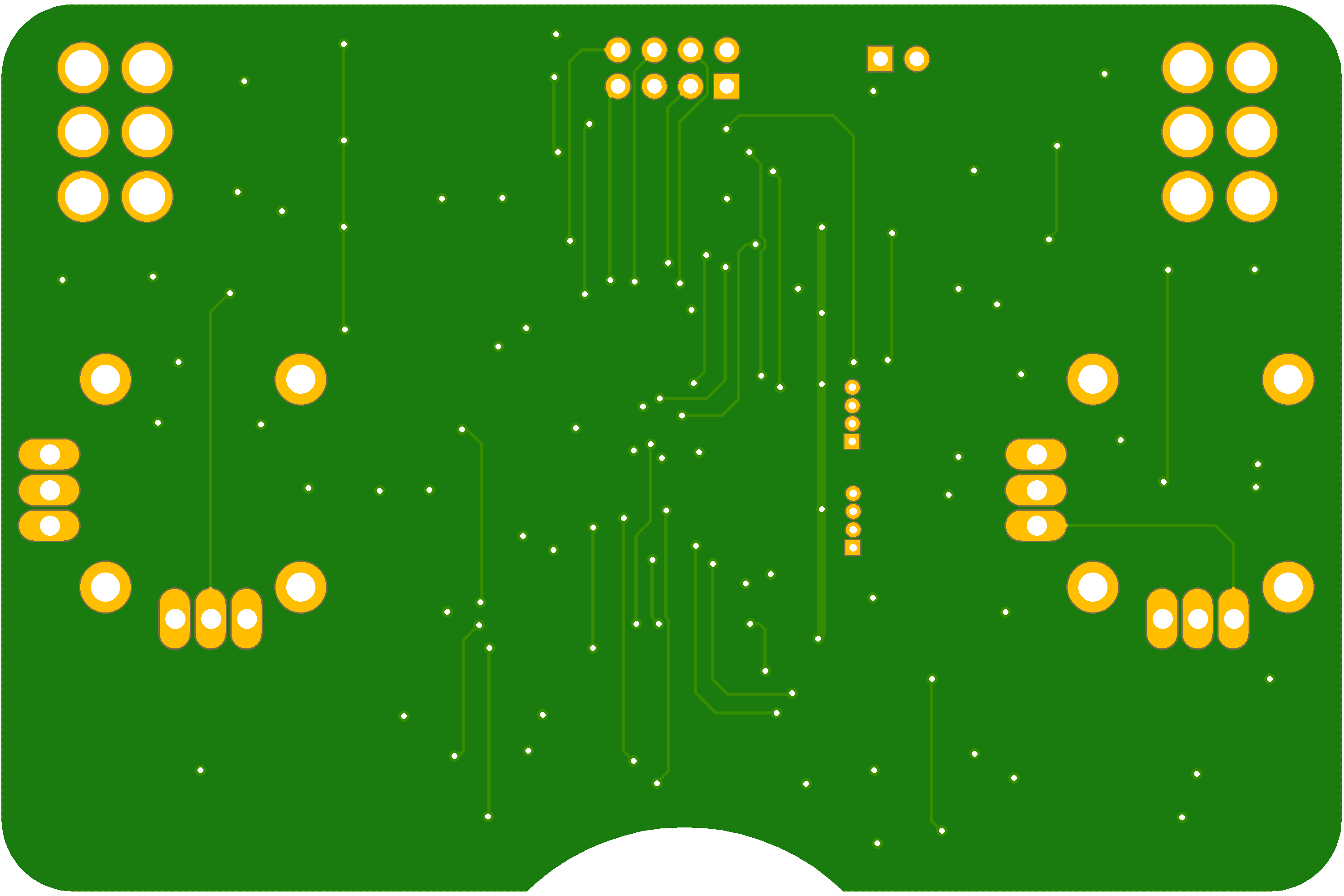
Copyright © 2015-2023 问渠网 辽ICP备15013245号